三维重建_摄像头标定+双目摄像头立体校正计算点云三维重建体积_优质项目分享
”双目摄像头 摄像头标定 立体校正 三维重建 优质项目“ 的搜索结果
双目测三维体积_实现双目摄像头标定+立体校正+获取深度图+获取点云坐标+测三维重建后的体积_项目源码_优质项目分享
Android双目三维重建:Android双目摄像头实现双目测距 Android实现双目测距,Android双目三维重建,opencv三维重建,opencv双目测距

双目立体视觉的整体流程包括:图像获取、双目标定、双目矫正、立体匹配、三维重建。 Stereo Vision OpenCV+OpenGL 双目立体视觉三维重建 OpenCV 双目测距(双目标定、双目校正和立体匹配) 真实场景的双目立体...
1、双目立体视觉源代码(包括标定,匹配,三维重建) 2、双目视觉实验图片集(双目立体视觉中使用的标准实验图,适合初学者进 行实验使用) 3、双目立体视觉匹配程序(运用matlab进行双目立体视觉的深度信息匹配, ...

双目 MATLAB标定 ,查阅博主的【计算机视觉】摄像机标定 matlab toolbox_calib工具箱(单目标定和双目标定) 1 基本原理 得到了立体标定参数之后,就可以把参数放入xml文件,然后用cvLoad读入OpenCV了。具体...
Matlab是一种非常流行的编程语言和集成开发环境,可以用于图像处理、计算机视觉等领域。...在实现过程中需要综合考虑摄像头标定、图像矫正、深度计算、三维重建等多个方面的问题,才能够实现较为精确和完整的结果。
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者:Ali Yasin Eser编译:ronghuaiyang(AI 公园)导读双目立体校正和标定。大家好!今天我们将讨论什么是立体...

双目视觉三维重建框架
标签: 三维重建
玉米竭力用轻松具体的描述来讲述双目三维重建中的一些数学问题。希望这样的方式让大家以一个轻松的心态阅读玉米的《计算机视觉学习笔记》双目视觉数学架构系列博客。这个系列博客旨在捋顺一下已标定的双目视觉中的...
目前(2023年)主流的三维重建方法主要分为以下两类:基于深度相机(结构光、TOF、双目摄像头)的三维重建基于图像的三维重建。

C++完整的实现双目摄像头图像采集、双目摄像头畸变矫正、前景物体提取、生成视差图、深度图、PCL点云图
双目测距的基本原理如上图所示,双目测距主要是利用了目标点在左右两幅视图上成像的横向坐标直接存在的差异(即视差)与目标点到成像平面的距离Z存在着反比例的关系:Z=fT/d。“@scyscyao :在OpenCV中,f的量纲是...
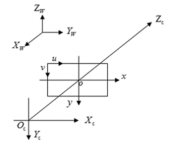
继续苦逼地学习SLAM的知识中。也许你还会看到相机外参数有这样表示的:这种表示方法是Rodrigue旋转向量的形式。...这是因为外积有一个性质就是外积的结果的向量的模等于以两个运算向量为邻边的平行四边形的面积,而平行...
来源:https://blog.csdn.net/qq_41204464/article/details/115387812作者:一颗小树X@CSDN(已授权)编辑:3D视觉开发者社区前言...
双目三维重建是一种利用双目摄像头获取图像信息,并通过计算得到物体的三维结构的技术。在Python中,可以使用OpenCV库来实现双目三维重建。通过双目标定、立体校正、双目匹配等步骤,可以得到视差图、深度图等可视化...


双目相机三维重建是一种利用双目摄像头获取的图像信息进行三维重建的技术。在Python中,可以使用OpenCV库来实现双目机三维重建。下面是一个简的示例代码,演示了如何使用Python和OpenCV进行双目相机三维重建: ```...

文章目录13.1 立体视觉的基础知识13.1.1 三维空间坐标13.1.2 3D位姿13.2 相机标定13.2.1 相机标定的目的和意义13.2.2 标定的参数13.2.3 准备标定板13.2.4 采集标定图像过程中与操作细节13.2.5 使用Halcon标定助手...


推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地